About
Hello! I am a computer science researcher interested in deep learning, computer vision, reinforcement learning, and robotics. Much of my work focuses on active perception and learning models of physical processes to support decision-making.
I am currently working as a Machine Learning (ML) Engineer at Aurora Innovations, helping build ML models to evaluate/grade motion planning performance and generate realistic scenarios to understand and test the capabilities of the Aurora driver. Previously, I worked as an ML Researcher at the University of California, Irvine, where I developed deep learning models to improve climate and weather forecasting on subseasonal-to-seasonal timescales.
I completed my M.Sc. in Computer Science at McGill University, where I worked in the Mobile Robotics Lab. My research focused on learning robust perception and control algorithms for autonomous underwater vehicles (AUVs). For my thesis, I built a robotic system to autonomously track, follow, and recover scuba divers, and validated it in the open ocean under harsh conditions. I also worked on an off-road navigation project, where we trained a transformer network to predict future terrain conditions, enabling an autonomous vehicle to stay on favorable terrain while navigating unmapped forest environments.
Prior to graduate school, I completed my B.Sc. at McGill University, majoring in Mathematics and Computer Science. As an undergraduate, I largely focused on software development/engineering and worked professionally as a software developer at Traction on Demand (now acquired by Salesforce), CloudOps, Sensequake, and ColorKarma.
Education
M.Sc. in Computer Science
McGill University
Graduated June 2024
Thesis: Following scuba divers with an autonomous underwater vehicle
B.Sc in Mathematics and Computer Science
McGill University
Graduated May 2022
Research
Uncertainty-aware hybrid paradigm of nonlinear MPC and model-based RL for offroad navigation: Exploration of transformers in the predictive model
Faraz Lotfi, Khalil Virji, Farnoosh Faraji, Lucas Berry, Andrew Holliday, David Meger, and Gregory Dudek
Presented at the 2024 International Conference on Robotics and Automation (ICRA)

In this paper, we investigate a hybrid control paradigm that merges nonlinear model predictive control (MPC) and model-based reinforcement learning (RL) for autonomous navigation of a model car across off-road, unstructured terrain without predefined maps. Inspired by BADGR, an LSTM-based network that predicts future events from an image and a sequence of control actions, we investigate the replacement of LSTM modules with transformers to significantly improve predictive performance. To address uncertainty, we train an ensemble of models that estimate the mutual information between weights and outputs, facilitating dynamic horizon planning through variable speeds. To account for the intricacies of our vehicle's model and states, we also incorporate a nonlinear MPC into our control loop. The model-based RL module produces steering angles and quantifies uncertainty, while the nonlinear MPC suggests optimal throttle settings. This allows us to strike a balance between goal attainment speed and model uncertainty. Our approach consistently outperforms existing baselines in predicting future events and integrates the vehicle's kinematic model for enhanced decision-making.
Robust Scuba Diver Tracking and Recovery in Open Water Using YOLOv7, SORT, and Spiral Search
Faraz Lotfi, Khalil Virji, Gregory Dudek
Presented at the 2023 Conference on Robots and Vision (CRV)

In this paper, we address the challenge of underwater object tracking using a two-part approach: perception and control. Our method leverages AQUA, a highly maneuverable autonomous underwater vehicle (AUV), for open-water experiments. We employ PID controllers for AUV control and a spiral search algorithm for target recovery. Our approach relies solely on observations in the image plane, eliminating the need for robot localization or camera calibration. By combining YOLOv7 for target detection, SORT filtering for temporal stability, and the spiral search algorithm for target recovery, we demonstrate strong long-term tracking performance across both offline datasets and open-water experiments in harsh ocean conditions in Barbados.
DRIFT-NCRN: A Benchmark Dataset for Drifter Trajectory Prediction
Johanna Hansen, Khalil Virji, Travis Manderson, David Meger, and Gregory Dudek
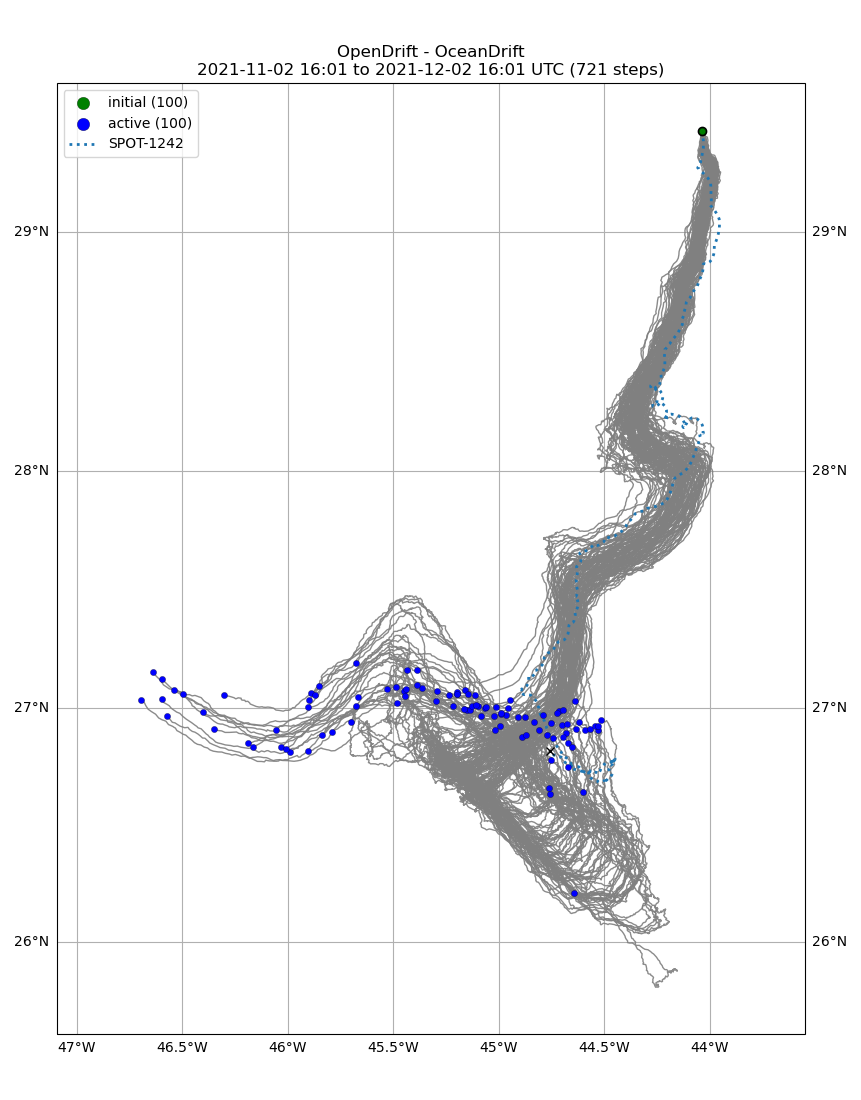
Due to intricate interactions between the ocean and the atmosphere, predicting the paths of nonactuated floating objects in the ocean is challenging, especially over long-term horizons. Despite these complexities, long-term trajectory prediction is vital for search and rescue operations, ecological research, and disaster response. Inspired by the DARPA Forecasting Floats in Turbulence challenge, we introduce an open-source benchmark dataset for evaluating oceanic trajectory prediction models. This dataset combines ocean drifter paths and historical wind and current data, enabling the development of machine learning (ML) models tailored to the complexities of drifter trajectory prediction. Alongside this benchmark dataset, we offer a baseline solution set created using OpenDrift, an open-source tool for modeling object trajectories in the ocean and atmosphere.
Projects
Coursework
Computer Science
- Reinforcement Learning
- Applied Robotics
- Applied Machine Learning
- Computational Perception
- Artificial Intelligence
- Fundamentals of Computer Vision
- Information Privacy and Security
- Robotics and Intelligent Systems
- Project in Computer Science
- Algorithm Design
- Theory of Computation
- Programming Languages and Paradigms
- Operating Systems
- Software Design
- Intro to Computer Systems
- Algorithms and Data Structures
- Intro to Software Systems
- Intro to Computer Science
- Foundations of Programming